Orbite
Pour les articles homonymes, voir Orbite (homonymie).
En mécanique céleste et en mécanique spatiale, une orbite (/ɔʁ.bit/) est la courbe fermée représentant la trajectoire que dessine, dans l'espace, un objet céleste sous l'effet de la gravitation et de forces d'inertie[1]. Une orbite est ainsi la courbe tracée par une trajectoire périodique. Dans le Système solaire, la Terre, les autres planètes, les astéroïdes et les comètes sont en orbite autour du Soleil. De même, des planètes possèdent des satellites naturels en orbite autour d'elles. Des objets artificiels, comme les satellites et les sondes spatiales sont en orbite autour de la Terre ou d'autres corps du système solaire.


Une orbite a la forme d'une ellipse dont l'un des foyers coïncide avec le centre de gravité de l'objet central. D'un point de vue relativiste, une orbite est une géodésique dans l'espace-temps courbe.
Historique
modifierDe nombreux modèles sont proposés dès l'Antiquité pour représenter les mouvements des planètes. Le mot planète – en grec ancien πλανήτης / planḗtēs, adjectif signifiant « errant, vagabond[2] » – distingue alors ces objets célestes des étoiles « fixes » par leur mouvement apparent sur la sphère céleste au cours du temps. À cette époque, cette notion inclut donc le Soleil et la Lune ainsi que cinq planètes authentiques : Mercure, Vénus, Mars, Jupiter et Saturne. Tous ces systèmes sont géocentriques, c'est-à-dire qu'ils placent la Terre au centre de l'Univers, selon le système astronomique exposé par Platon dans le Timée. Selon Simplicius (fin Ve siècle - début VIe siècle ap. J.-C.)[3] c'est Platon (427-327 av. J.-C.) qui aurait proposé à son élève Eudoxe de Cnide (408-355 av. J.-C.) d'étudier le mouvement des planètes en n'utilisant que des mouvements circulaires et uniformes, considérés comme parfaits[4].
La difficulté de décrire précisément les mouvements des planètes, notamment les phénomènes de rétrogradation, conduit à des représentations complexes. Les connaissances astronomiques du monde gréco-romain sont résumées au IIe siècle de notre ère par Ptolémée (vers 90 - 168 ap. J.-C.), dans un ouvrage en grec transmis par les Arabes sous le nom de l'Almageste. Connu sous le nom de modèle de Ptolémée, la représentation du système solaire et du mouvement des planètes (ainsi que de la Lune et du Soleil) utilise comme ses prédécesseurs un modèle géocentrique, et un système élaboré de sphères en rotation circulaire et uniforme, les épicycles et déférents, introduit par Hipparque (IIe siècle av. J.-C.), qu'il perfectionne en introduisant la notion d'équant, qui est un point distinct du centre du cercle déférent par rapport auquel une planète, ou le centre d'un épicycle, se déplace à vitesse uniforme. Le système de Ptolémée va dominer l'astronomie pendant quatorze siècles. Il donne des résultats satisfaisants malgré sa complexité, au besoin en modifiant et raffinant le modèle des épicycles, déférents, et points équants. Considéré comme compatible avec la philosophie d'Aristote, le géocentrisme devient doctrine officielle de l’Église en Europe au cours du Moyen Âge.
On doit à Copernic (1473-1543) qui dans son ouvrage majeur De revolutionibus Orbium Coelestium publié à sa mort en 1543 remet en cause le dogme géocentrique et proposant un système héliocentrique, dans lequel les planètes et la Terre se déplacent selon des orbites circulaires, parcourues à vitesses constantes, la Lune étant le seul astre tournant autour de la Terre. Bien qu'imparfaite, cette vision s'avère très féconde : les mouvements des planètes sont plus simples à décrire dans un référentiel héliocentrique[4]. L'ensemble des irrégularités de mouvements telles que les rétrogradations s'explique uniquement par le mouvement de la Terre sur son orbite, plus précisément en termes modernes par l'effet du passage du référentiel héliocentrique au référentiel géocentrique. Le système de Copernic permet également de supposer que les étoiles de la « sphère des fixes » sont à une distance bien plus grande de la Terre (et du Soleil) que l'on le supposait jusqu'alors, pour expliquer l'absence d'effet observé alors (parallaxe) du mouvement de la Terre sur la position des étoiles. Il est à noter qu'initialement le système de Copernic, qui sur la pratique astronomique consistait à échanger les positions de la Terre et du Soleil, ne suscita pas une opposition de principe de l’Église, jusqu'à ce que celle-ci s'aperçut que ce modèle remettait en cause la philosophie d'Aristote[4]. Kepler (1571-1630) perfectionnera ce modèle, grâce à l'analyse soigneuse des observations précises de son maître Tycho Brahe (1541-1601), notamment concernant le mouvement de la planète Mars. Il publie ses trois célèbres lois (Cf. Lois de Kepler) en 1609, 1611, 1618[4] :
- Première loi : « Les planètes décrivent des ellipses dont le Soleil occupe l'un des foyers. »
- Deuxième loi : « Le rayon vecteur reliant le centre de la planète au foyer décrit des aires égales en des temps égaux. »
- Troisième loi : « Les cubes des demi-grands axes des orbites sont proportionnels au carré des périodes de révolution. »
Orbite képlérienne
modifierUne orbite képlérienne est l'orbite d'un corps assimilable à un point — c'est-à-dire dont la distribution des masses possède une symétrie sphérique — et soumis au champ de gravitation créé par une masse également assimilable à un point, ce dernier étant pris comme origine du référentiel. Autrement dit, c'est l'orbite d'un corps en interaction gravitationnelle avec un seul autre corps, chaque corps étant assimilé à un point[5],[6].
L'orbite képlérienne de chaque corps est une orbite conique dont un des foyers coïncide avec le centre de masse de l'autre corps pris comme origine du référentiel.
Paramètres orbitaux
modifierUne orbite elliptique est décrite au moyen de deux plans — le plan de l'orbite et le plan de référence — et de six paramètres appelés éléments orbitaux : le demi-grand axe, l'excentricité, l'inclinaison, la longitude du nœud ascendant, l'argument du périastre et la position de l'objet sur son orbite. Deux de ces paramètres - excentricité et demi-grand axe - définissent la trajectoire dans un plan, trois autres — inclinaison, longitude du nœud ascendant et argument du péricentre — définissent l'orientation du plan dans l'espace et le dernier - instant de passage au péricentre - définit la position de l'objet.
- Demi-grand axe : la moitié de la distance qui sépare le péricentre de l'apocentre (le plus grand diamètre de l'ellipse). Ce paramètre définit la taille absolue de l'orbite. Il n'a de sens en réalité que dans le cas d'une trajectoire elliptique ou circulaire (le demi-grand-axe est infini dans le cas d'une parabole ou d'une hyperbole)
- Excentricité : une ellipse est le lieu des points dont la somme des distances à deux points fixes, les foyers ( et sur le diagramme), est constante. L'excentricité mesure le décalage des foyers par rapport au centre de l'ellipse ( sur le diagramme) ; c'est le rapport de la distance centre-foyer au demi-grand-axe. Le type de trajectoire dépend de l'excentricité :
- : trajectoire circulaire
- : trajectoire elliptique
- : trajectoire parabolique
- : trajectoire hyperbolique









- Paramètres de l'orbite d'un satellite autour de la Terre
-
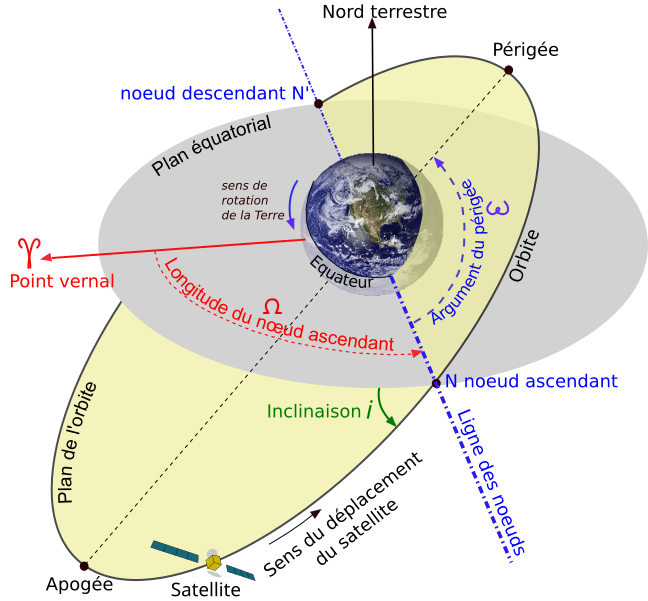 Paramètres orbitaux d'un satellite artificiel : ascension droite du nœud ascendant ☊, inclinaison i, argument du périgée ω.
Paramètres orbitaux d'un satellite artificiel : ascension droite du nœud ascendant ☊, inclinaison i, argument du périgée ω. -
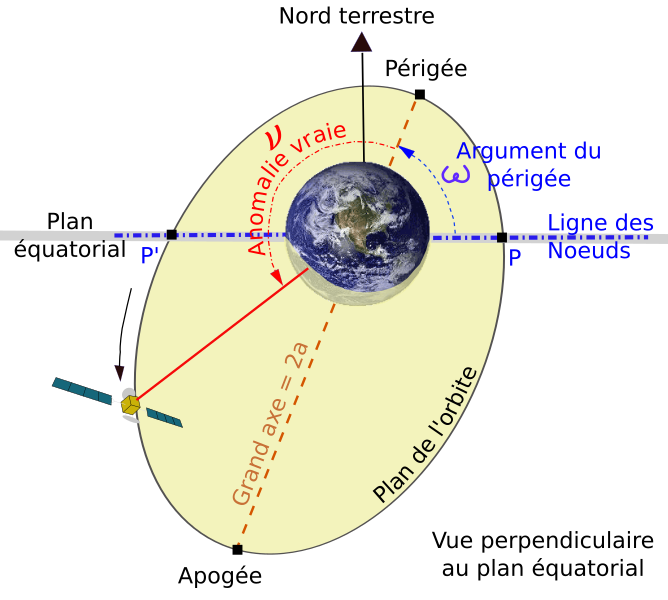 Vue perpendiculaire au plan orbital : demi-grand axe a, argument du périgée ω, anomalie vraie ν.
Vue perpendiculaire au plan orbital : demi-grand axe a, argument du périgée ω, anomalie vraie ν.


Le plan de référence ou plan référentiel est un plan contenant le centre de gravité du corps principal. Le plan de référence et le plan de l'orbite sont ainsi deux plans sécants. Leur intersection est une droite appelée ligne des nœuds. L'orbite coupe le plan de référence en deux points, appelés nœuds. Le nœud ascendant est celui par lequel le corps passe en trajectoire ascendante ; l'autre est le nœud descendant.
Le passage entre le plan orbital et le plan de référence est décrit par trois éléments qui correspondent à des angles d'Euler[7] :
- L'inclinaison, notée , qui correspond à l'angle de nutation : l'inclinaison (entre 0 et 180 degrés) est l'angle que fait le plan orbital avec un plan de référence. Ce dernier étant en général le plan de l'écliptique dans le cas d'orbites planétaires (plan contenant la trajectoire de la Terre.
- La longitude du nœud ascendant, notée ☊, qui correspond à l'angle de précession : il s'agit de l'angle entre la direction du point vernal et la ligne des nœuds, dans le plan de l'écliptique. La direction du point vernal est la droite contenant le Soleil et le point vernal (point de repère astronomique correspondant à la position du Soleil au moment de l'équinoxe du printemps). La ligne des nœuds est la droite à laquelle appartiennent les nœuds ascendant (le point de l'orbite où l'objet passe du côté nord de l'écliptique) et descendant (le point de l'orbite où l'objet passe du côté sud de l'écliptique).
- L'argument du périastre, noté , qui correspond à l'angle de rotation propre : il s'agit de l'angle formé par la ligne des nœuds et la direction du périastre (la droite à laquelle appartiennent l'étoile (ou l'objet central) et le périastre de la trajectoire de l'objet), dans le plan orbital. La longitude du périastre est la somme de la longitude du nœud ascendant et de l'argument du périastre.


Le sixième paramètre est la position du corps orbitant sur son orbite à un instant donné. Elle peut être exprimée de plusieurs manières :
- L'anomalie moyenne à l'époque, notée Mo ;
- L'anomalie vraie ;
- L'argument de latitude.
- Instant τ de passage au périastre : la position de l'objet sur son orbite à un instant donné est nécessaire pour pouvoir la prédire pour tout autre instant. Il y a deux façons de donner ce paramètre. La première consiste à spécifier l'instant du passage au périastre. La seconde consiste à spécifier l'anomalie moyenne M de l'objet pour un instant conventionnel (l'époque de l'orbite). L'anomalie moyenne n'est pas un angle physique, mais spécifie la fraction de la surface de l'orbite balayée par la ligne joignant le foyer à l'objet depuis son dernier passage au périastre, exprimée sous forme angulaire. Par exemple, si la ligne joignant le foyer à l'objet a parcouru le quart de la surface de l'orbite, l'anomalie moyenne est ° °. La longitude moyenne de l'objet est la somme de la longitude du périastre et de l'anomalie moyenne.


Périodes
modifierLorsqu'on parle de la période d'un objet, il s'agit en général de sa période sidérale, mais il y a plusieurs périodes possibles :
- Période sidérale : Temps qui s'écoule entre deux passages de l'objet devant une étoile distante. C'est la période « absolue » au sens newtonien du terme.
- Période anomalistique : temps qui s'écoule entre deux passages de l'objet à son périastre. Selon que ce dernier est en précession ou en récession, cette période sera plus courte ou longue que la sidérale.
- Période draconitique : temps qui s'écoule entre deux passages de l'objet à son nœud ascendant ou descendant. Elle dépendra donc des précessions des deux plans impliqués (l'orbite de l'objet et le plan de référence, généralement l'écliptique).
- Période tropique : temps qui s'écoule entre deux passages de l'objet à l'ascension droite zéro. À cause de la précession des équinoxes, cette période est légèrement et systématiquement plus courte que la sidérale.
- Période synodique : temps qui s'écoule entre deux moments où l'objet prend le même aspect (conjonction, quadrature, opposition, etc.). Par exemple, la période synodique de Mars est le temps séparant deux oppositions de Mars par rapport à la Terre; comme les deux planètes sont en mouvement, leur vitesses angulaires relatives se soustraient, et la période synodique de Mars se révèle être 779,964 d (1,135 années martiennes).
Relations entre les anomalies et les rayons
modifierDans ce qui suit, est l'excentricité, l'anomalie vraie, l'anomalie excentrique et l'anomalie moyenne.



Le rayon de l'ellipse (mesuré depuis un foyer) est donné par :


Les relations suivantes existent entre les anomalies :


ou encore

Une application fréquente consiste à trouver à partir de . Il suffit alors d'itérer l'expression :

Si on utilise une valeur initiale , la convergence est garantie, et est toujours très rapide (dix chiffres significatifs en quatre itérations).


Orbite d'un satellite artificiel et trace au sol
modifierLa trace au sol d'un satellite artificiel est la projection au sol de sa trajectoire sur son orbite selon une verticale qui passe par le centre du corps céleste autour duquel il tourne. Sa forme détermine les portions de surface balayées par les instruments du satellite et les créneaux de visibilité du satellite par les stations terrestres. Le dessin de la trace résulte à la fois du déplacement du satellite sur son orbite et de la rotation de la Terre.
Classification des orbites des satellites artificiels
modifier

Les orbites des satellites artificiels peuvent être classifiées selon différents critères :
Altitude (orbite circulaire)
modifierQuand l'orbite est quasiment circulaire elle est appelée orbite basse (LEO, de l'anglais Low Earth Orbit) si son altitude est inférieure à 1 500 km, orbite moyenne (MEO, de Medium Earth Orbit) si elle est comprise entre 1 500 et 20 000 km, et orbite haute au-delà. L'orbite haute la plus courante, car permettant au satellite de rester en permanence au-dessus de la même région de la Terre est située à une altitude de 36 000 km et est appelé orbite géostationnaire (ou GEO de l'anglais Geostationnary Earth Orbit). Elle nécessite que l'inclinaison orbitale soit de 0°. Une orbite à cette altitude avec une inclinaison orbital nulle ou non est une orbite géosynchrone. La plupart des satellites placés sur une orbite circulaire autour de la Terre se trouvent soit sur une orbite basse (satellite d'observation de la Terre, satellite de reconnaissance) soit sur une orbite moyenne à 20 000 km (satellite de navigation) soit sur une orbite géostationnaire (satellite de télécommunications, satellite météorologique)[8].
Altitude (orbite elliptique)
modifierParmi les orbites hautes elliptiques (ou HEO de l'anglais High Earth Orbit) on trouve des orbites répondant à des objectifs très précis comme l'orbite de Molnia permettant une meilleure visibilité depuis les latitudes hautes que l'orbite géostationnaire ou l'orbite toundra qui en est une variante. L'orbite de transfert (ou GTO de l'anglais Geostationnary Transfer Orbit) est une orbite transitoire dont l'apogée se situe à 36 000 km et qui est utilisée par les satellites qui doivent se placer sur une orbite géostationnaire[8].
Cas particulier des orbites autour des Points de Lagrange
modifierL'orbite autour d'un point de Lagrange (zone de l'espace ou l'influence gravitationnelle de 2 corps célestes s'équilibre) est une orbite de halo (ou orbite de Lissajous par allusion à sa forme qui ressemble à une courbe de Lissajous) et est notée L1LO (L1 Lissajous Orbit) ou L2LO, L1 et L2 étant les deux points de Lagrange du système Terre-Soleil utilisés notamment par des satellites d'observation astronomique ou d'étude du Soleil. Ces orbites instables sont parcourues en environ 200 jours et nécessitent des manœuvres de correction régulières[8].
Inclinaison orbitale
modifierSelon la valeur de l'angle d'inclinaison orbitale i, on parle d'orbite équatoriale (i=0°), orbite quasi-équatoriale (i<10°), orbite polaire ou quasi-polaire (i proche de 90°). Si l'inclinaison orbitale est inférieure ou égale à 90°, ce qui est le cas de la majorité des satellites, l'orbite est dite directe (ou prograde), sinon elle est dite rétrograde[8].
Propriété
modifierOn oppose parfois les satellites en orbite géostationnaire, en position fixe au-dessus de la Terre, aux satellites défilants. Dans la catégorie des orbites polaires, une orbite très utilisée, l'orbite héliosynchrone, se caractérise par le mouvement de son plan orbital qui pivote sous l'effet de la précession nodale de manière synchrone avec le mouvement de la Terre autour du Soleil. Un satellite de ce type repasse toujours à la même heure solaire au-dessus d'une région éclairée. Une orbite phasée est une catégorie d'orbite héliosynchrone caractérisée par le fait que le satellite après un certain nombre de révolutions repasse exactement au-dessus du même point[8].
Autres désignations non liées aux caractéristiques de l'orbite
modifierUn engin spatial peut être placé sur une orbite d'attente (généralement une orbite basse) dans le but d'atteindre une position favorable pour effectuer la prochaine manœuvre orbitale. Une orbite de dérive est une orbite transitoire parcourue par les satellites pour atteindre de manière passive leur position finale en orbite géostationnaire. Enfin en fin de vie, le satellite est placée sur une orbite cimetière (ou orbite de rebut) pour éviter de se retrouver sur la trajectoire des satellites actifs.
Étymologie et sens mathématique
modifierLe substantif féminin « orbite » est un emprunt au latin orbita, désignant la trace d'une roue[9],[10].
Initialement, le terme orbite est un terme utilisé en mathématiques pour désigner l'ensemble des points parcourus par une trajectoire, c'est-à-dire par une courbe paramétrée. La différence entre "orbite" et "trajectoire" consiste dans le fait que la trajectoire exprime l'évolution du point tandis que l'orbite est un concept "statique". Ainsi pour une trajectoire , l'orbite est l'ensemble .


Une orbite peut donc avoir n'importe quelle forme selon la dynamique du système étudié, mais avec le temps l'usage du terme s'est vu réservé aux orbites fermées en astronomie et astronautique.
Notes et références
modifier- Informations lexicographiques et étymologiques d'« orbite » (sens II-A) dans le Trésor de la langue française informatisé, sur le site du Centre national de ressources textuelles et lexicales.
- Anatole Bailly ; 2020 : Hugo Chávez, Gérard Gréco, André Charbonnet, Mark De Wilde, Bernard Maréchal & contributeurs, « πλανήτης »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?), sur bailly.app, (consulté le ).
- Ainsi dans ses Commentaires au traité Du ciel d'Aristote, celui-ci écrit :
« Platon […] pose alors ce problème aux mathématiciens : quels sont les mouvements circulaires et uniformes et parfaitement réguliers qu'il convient de prendre pour hypothèses, afin que l'on puisse sauver les apparences que les astres errants présentent ? »
— Simplicius, Commentaires sur le traité Du ciel d'Aristote, II, 12, 488 et 493.
. - Voir par exemple Encyclopédia Universalis, édition 2002, volume 3, article « Astronomie et astrophysique » (ISBN 2-85229-550-4), ou encore Notionnaires Universalis - Idées, (ISBN 2-85229-562-8), Encyclopedia Universalis France SA, Paris, 2005.
- « Enrichissement du vocabulaire des techniques spatiales », dans Ministère de l'Industrie (France), Enrichissement du vocabulaire pétrolier, nucléaire et des techniques spatiales (lire en ligne), p. 33 (consulté le 6 avril 2014)
- « Orbite klépérienne », sur culture.fr (consulté le ).
- (fr) Luc Duriez, « Le problème des deux corps revisité », dans Daniel Benest et Claude Froeschle (éd.), Les méthodes modernes de la mécanique céleste, Gif-sur-Yvette, Frontières, 2e éd., 1992, p. 18 (ISBN 2-86332-091-2)
- Michel Capderou, Satellites : de Kepler au GPS, Paris/Berlin/Heidelberg etc., Springer, , 844 p. (ISBN 978-2-287-99049-6, lire en ligne), p. 321-322
- « Orbite », dans le Dictionnaire de l'Académie française, sur Centre national de ressources textuelles et lexicales.
- [1] (consulté le 6 avril 2014)
Bibliographie
modifier- Yvon Villarceau, Mémoire sur la détermination des orbites des planètes et des comètes, Forgotten books, (ISBN 978-0-332-62798-4)
- Michel Capderou, Satellites : de Kepler au GPS, Paris/Berlin/Heidelberg etc., Springer, , 844 p. (ISBN 978-2-287-99049-6, lire en ligne)
Voir aussi
modifierArticles connexes
modifier- Mouvement képlérien, Problème à deux corps
- Orbite géostationnaire, Orbite héliosynchrone, Orbite héliocentrique
- Satellite artificiel
- Liste d'orbites
- Déclin d'orbite
- Orbitographie, Two-Line Elements (TLE), représentation standard des paramètres orbitaux d'objets en orbite terrestre
- Orbiteur, un logiciel gratuit de simulation spatiale
Liens externes
modifier- YAN Kun(2005). The general expression of Binet equation about celestial bodies motion orbits(Approximate solutions of Binet equation for celestial bodies motion orbits in the weak and strong gravitational field) DOI:10.3969/j.issn.1004-2903.2005.02.052.